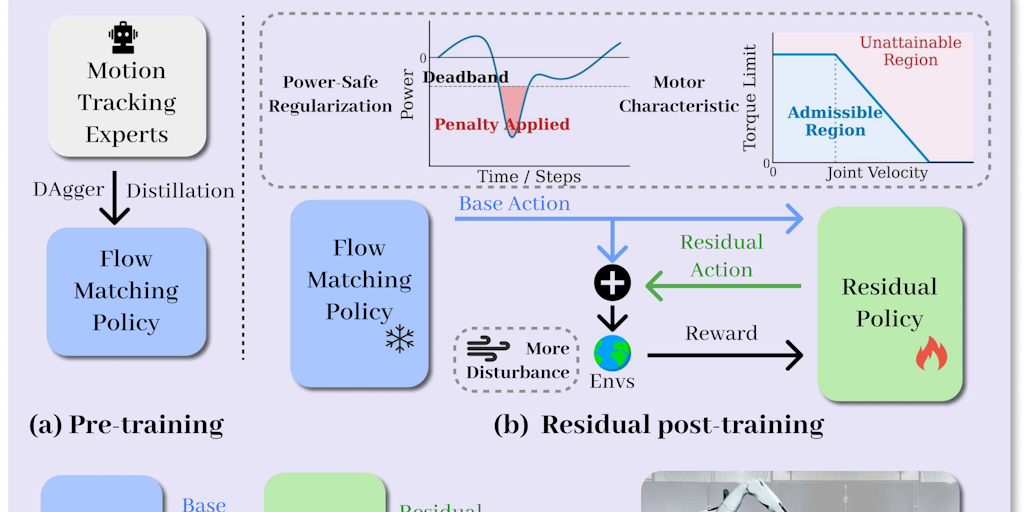
OmniXtreme is an open-source control framework pushing humanoids to hyperhuman limits. It balances generative Flow Matching for extreme motion planning with strict physical envelope clipping to prevent motor burnouts.
OmniXtreme is a humanoid robot platform designed for advanced research and development, available in standard G1 and G1 EDU variants. The standard model has 23 degrees of freedom, while the EDU model offers up to 43 DOF, including optional dexterous hand with force control. Standing 1320mm tall and weighing approximately 35kg, this platform serves engineers and researchers pushing the boundaries of humanoid robotics. It offers industrial-grade components such as high-torque knee joints up to 120N.m and low-inertia PMSM motors for superior response and heat dissipation. The core value lies in its flexible secondary development options, allowing users to customize both hardware and software for experimental needs.
The humanoid robotics industry remains in early exploration, presenting a gap for reliable, off-the-shelf platforms for advanced research. OmniXtreme bridges this gap with a complete system featuring industrial-grade components like high-torque knee joints (up to 120N.m) and low-inertia motors. It includes depth camera, 3D LiDAR, a 4-microphone array, and a speaker for environmental sensing. The built-in dual encoder system ensures accurate position feedback, while local air cooling prevents overheating during prolonged use. With an 8-core CPU and WiFi/Bluetooth connectivity, researchers can immediately integrate control software. This platform eliminates many hardware hurdles, allowing focus on innovation.
The physical structure of OmniXtreme is carefully engineered for both strength and flexibility. The base model provides 23 degrees of freedom (DOF), while the EDU version expands to 43 DOF, including optional waist and wrist joints. The waist joint on the EDU model allows rotation of ±155° plus additional pitch and roll axes. The hip joint offers rotation ranges of ±154° in pitch, -30° to +170° in roll, and ±158° in yaw. The knee joint can bend from 0° to 165°, providing a wide range of motion for dynamic movements. The robot uses industrial-grade crossed roller bearings in joints for high precision and load capacity. The joint motors are low inertia high-speed internal rotor PMSMs, which improve response speed and heat dissipation. The maximum torque at the knee reaches 120N.m, enabling powerful leg actions. The arm can lift up to 3kg on the EDU variant, supporting manipulation tasks.
The OmniXtreme humanoid is equipped with full joint hollow electrical routing, protecting wires from wear. Dual encoders in each joint provide redundant and precise position data. A local air cooling system keeps internal temperatures stable during high-performance tasks. Power is supplied by a 13-string lithium battery with a capacity of 9000mAh, offering about 2 hours of operation. The standard computing module is an 8-core high-performance CPU, with an option to upgrade to a higher computing module such as the Orin for more intensive AI workloads. For perception, the robot mounts a depth camera and a 3D LiDAR sensor, enabling environment mapping and obstacle avoidance. A 4-microphone array captures audio direction, while a 5W speaker allows for verbal feedback. Communication includes WiFi 6 and Bluetooth 5.2, ensuring fast data exchange. These electrical features make the platform suitable for autonomous research.
Publisher
A
admin
Launch Date2026-03-06
Platformapi
Pricingfree
Domain Authority
Ahrefs DR73/100
Traffic Insights
Month2026-01
Estimated Visits520.4K
MoM Visits Growth+9.7%(+46.2K)
Avg Time on Site1m 27s